Gizmo (Mechatronics)
Jumping Robot
Brief
Engineer a self-righting robot under 200g to jump 30 cm in height and distance with an IP54 Protection.
Skills Used
- Machine Element Selection
- Engineering Analysis
- Design for Manufacture
Opportunity

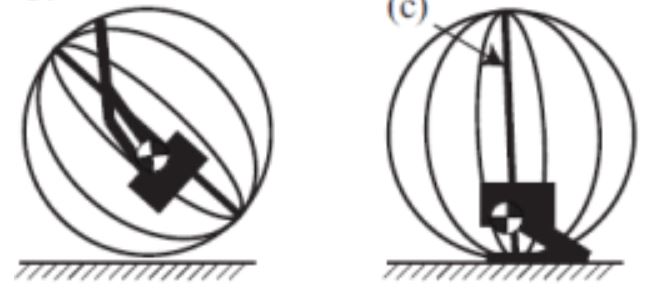
Single legged jumping robots provide an efficient locomotion across a variety of terrains, enabling obstacles to be easily overcome . They present a clear advantage in very rough terrain over walking and wheeled robots. The potential applications range from transportation of objects, search and rescue and exploration and sensing in hazardous environments. Many existing robots in this space have used nature as their source of inspiration.
Development
Engineering Analysis
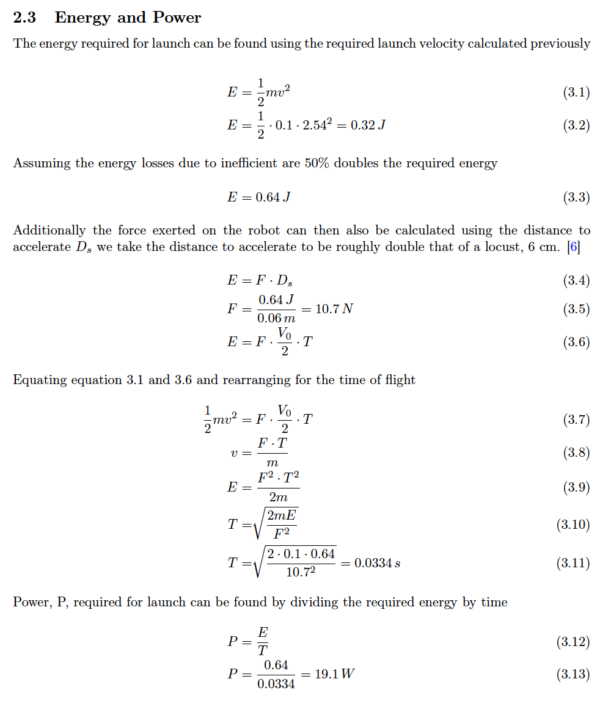
The design was designed using extensive engineering analysis for machine element selection and mathematical models. Failure analysis was also performed to understand the design’s behaviour under extream conditions.
Morphological Analysis
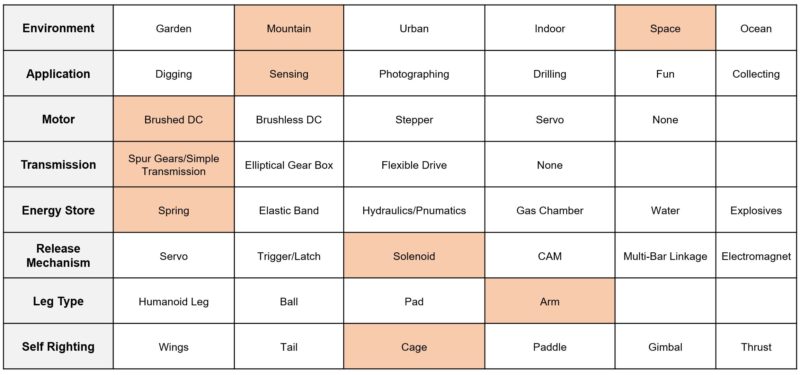
Morpholigical Analysis Chart used to evaluate potential design opportunities. This injects a degree of randomness to the design process to stimulate creative and novel solutions.
.
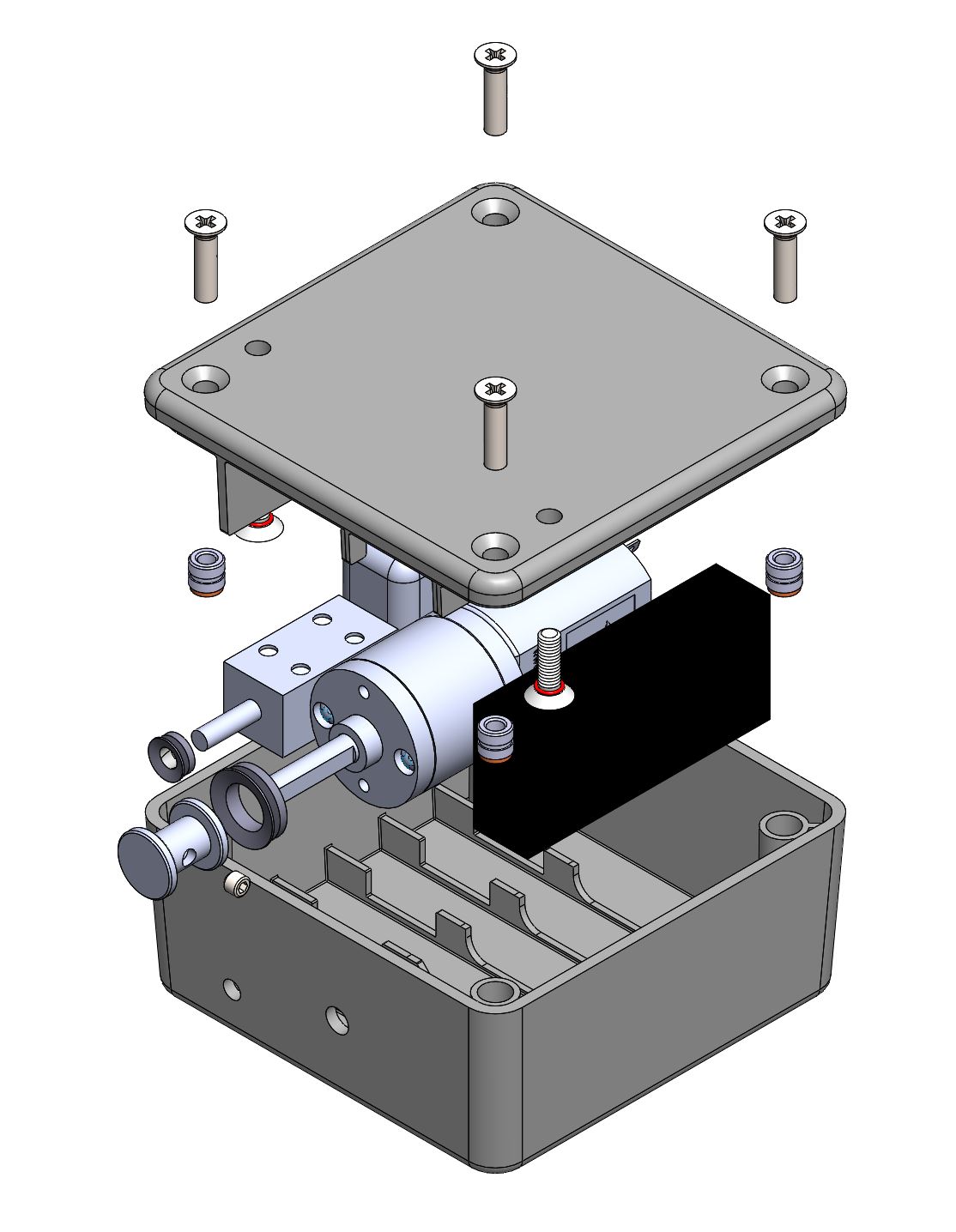
Machine Element Selection
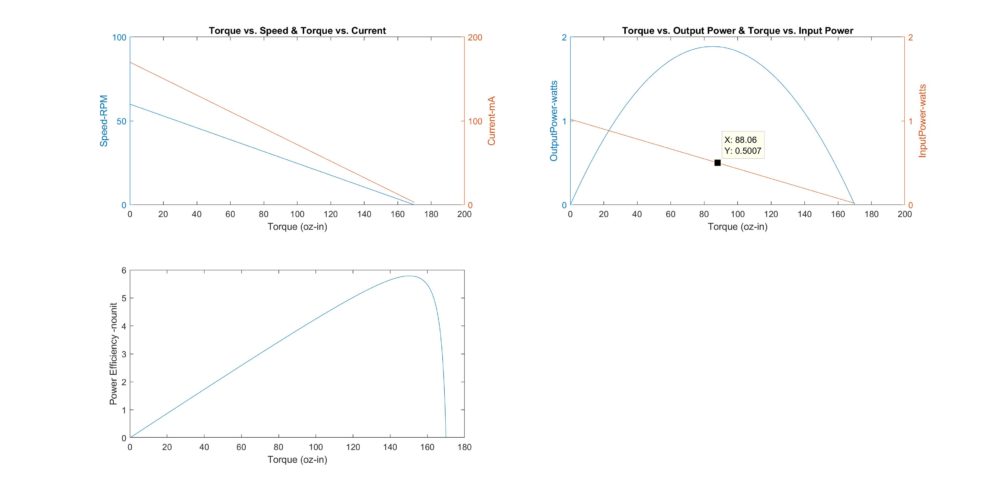
All the components for the robot were selected including motors, gears, battery, bearings, screws and more to form the full bill of materials needed for the robot.
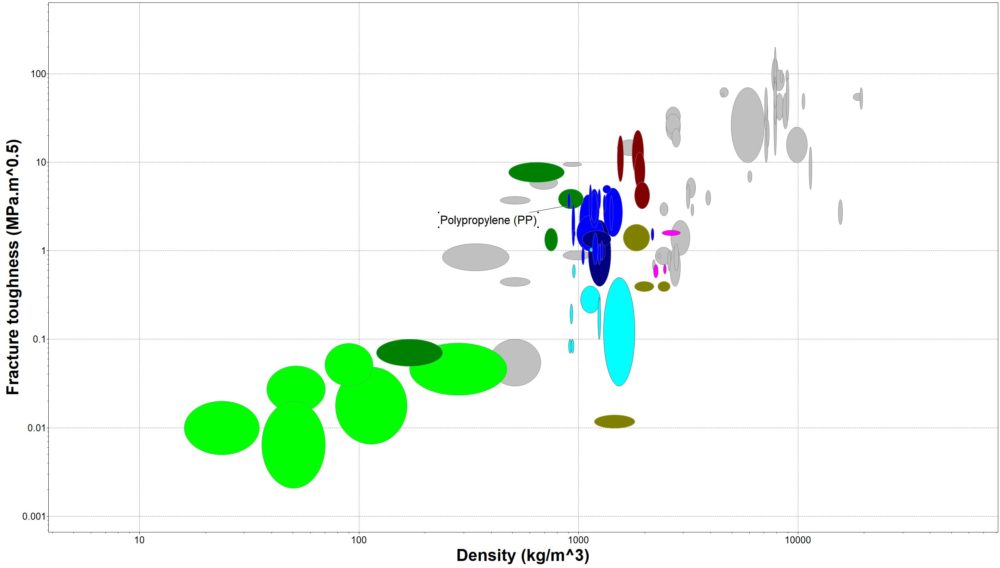
Material Selection
Material selection, to ensure materials would survive the impact of landing, was performed using the CES material selector and Ashby Plots. Cost and mass were also condidered.
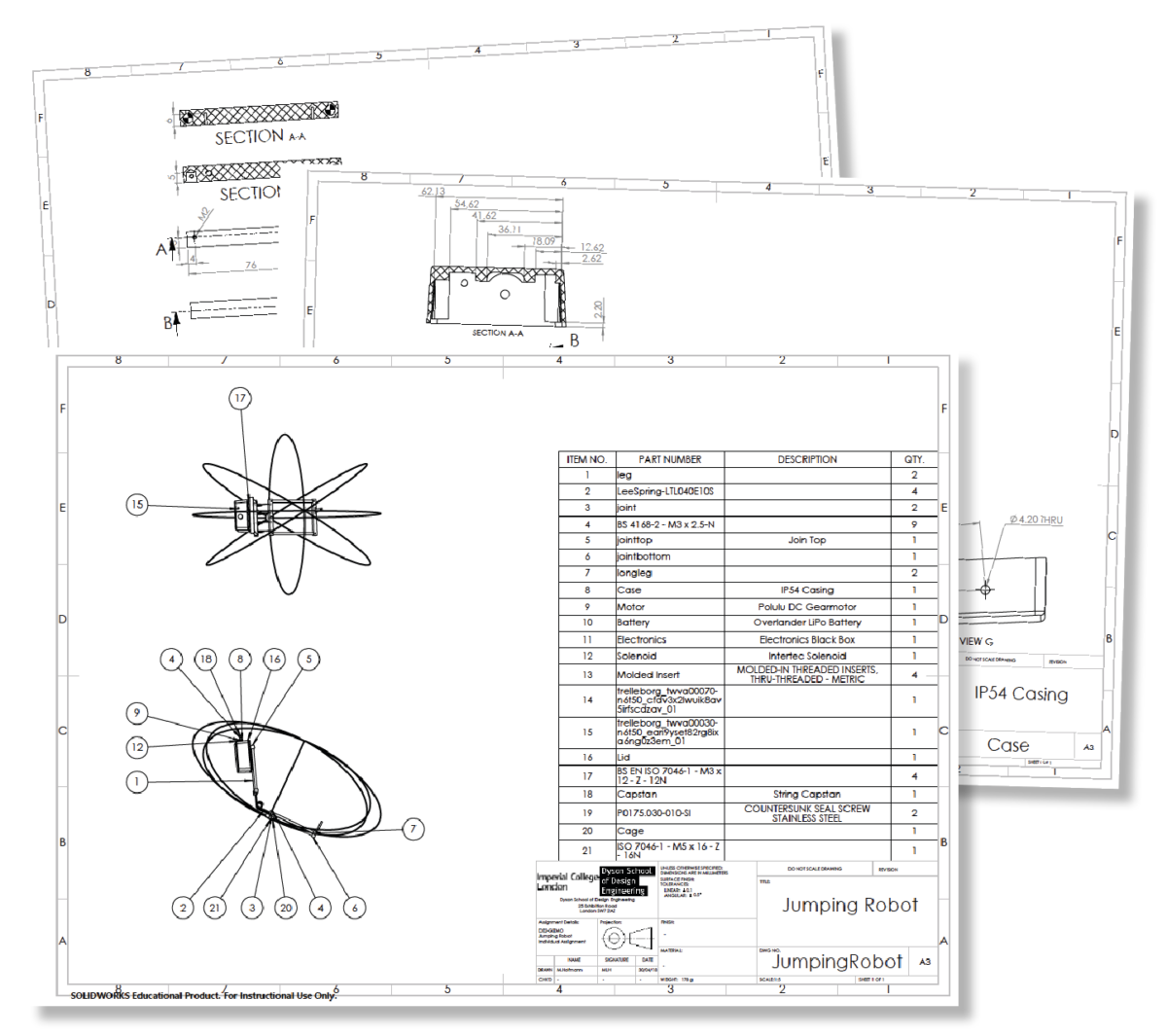
Technical Drawing Suite
Produced a full technical drawing suite for the jumping robot to BS:8888 to allow the robot to be manufactured.
Solution
The robot design presented fulfills all the criteria set out in the original brief. The grasshopper inspired design allowed for a mechanism that was robust for hazardous environments that delivered the jumping performance required. Further, development on the direction of locomotion provides the obvious next step. Whilst further work would be needed to take the proposed design from concept to a marketable functioning robot.